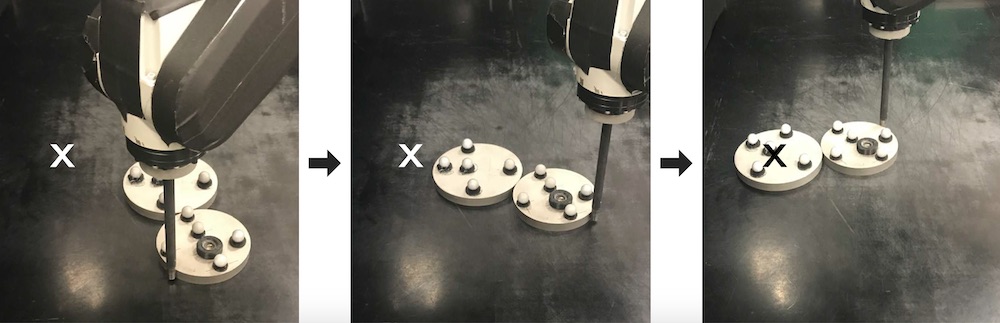
Task: The robot wants to push the top disk to a goal position by pushing on the bottom disk. Here we show three snapshots within a successful push (target marked as X). The robot learns to first push the bottom disk to the right and then use it to push the top disk to the target position.
Abstract
Physics engines play an important role in robot planning and control; however, many real-world control problems involve complex contact dynamics that cannot be characterized analytically. Most physics engines therefore employ approximations that lead to a loss in precision. In this paper, we propose a hybrid dynamics model, simulator-augmented interaction networks (SAIN), combining a physics engine with an object-based neural network for dynamics modeling. Compared with existing models that are purely analytical or purely data-driven, our hybrid model captures the dynamics of interacting objects in a more accurate and data-efficient manner. Experiments both in simulation and on a real robot suggest that it also leads to better performance when used in complex control tasks. Finally, we show that our model generalizes to novel environments with varying object shapes and materials